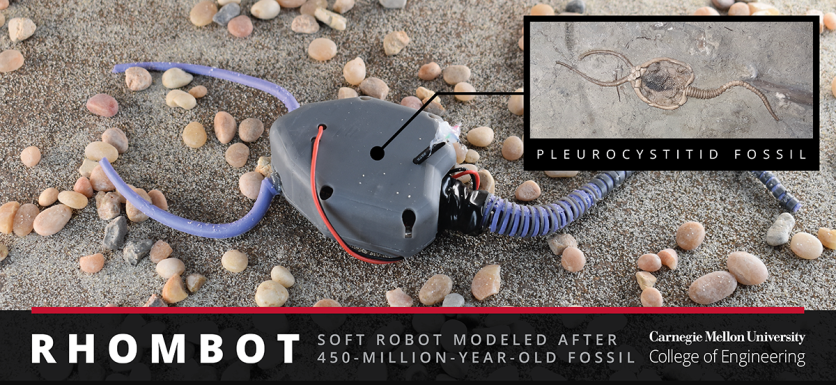
Scientists from Carnegie Mellon University, in partnership with paleontologists from Spain and Poland, have employed ancient fossil records to fabricate a soft robotic model of pleurocystitid.
This marine creature, which roamed the seas nearly 450 million years ago, is thought to be one of the earliest echinoderms capable of movement through a muscular stem.
Introducing Paleobionics
This research endeavors to expand contemporary comprehension of animal physiology and locomotion by introducing a nascent field of study known as paleobionics.
This discipline aims to employ soft robotics-utilizing pliable electronics and malleable materials-to dissect the biomechanical factors that propelled evolution, using long-extinct organisms as guides.
Professor Carmel Majidi, lead author and Mechanical Engineering Professor at Carnegie Mellon University, explained that soft robotics involves the use of supple materials in constructing flexible robotic limbs and extensions.
Given that human history accounts for a mere 0.007% of Earth's timeline, the present-day animal realm represents only a fragment of all the species that have inhabited our planet, according to the study.
By studying ancient fossil remains and combining 3D-printed elements with polymers to mimic the flexible structure of the mobile appendage, the team illustrated how pleurocystitids likely maneuvered along the seafloor using a powerful muscular stem.
Although no modern equivalent exists , paleontologists find pleurocystitids intriguing due to their fundamental role in echinoderm evolution.
The researchers said that employing sweeping, wide-ranging movements was probably the most efficient method of locomotion. Lengthening the stem significantly enhanced the creature's speed without imposing additional energy costs.
Read Also : Tiny Soft Robots Designed for Delicate Medical Procedures Are Uniquely Made From Plant-Based Hydrogel
Bio-Inspired Robotics
Richard Desatnik, co-first author and Ph.D. candidate, explained that researchers in the field of bio-inspired robotics must carefully select and adapt crucial characteristics from various organisms to inform their designs.
"Essentially, we have to decide on good locomotion strategies to get our robots moving. For example, would a starfish robot really need to use five limbs for locomotion, or can we find a better strategy?" Zach Patterson, co-first author and CMU alumnus, said in a statement.
The team now aspires to investigate other creatures for softbotics, such as the first organism capable of transitioning from sea to land - a phenomenon that cannot be scrutinized using conventional robotic hardware.
Co-author and Mechanical Engineering Professor at Carnegie Mellon University, Phil LeDuc, said, "Bringing a new life to something that existed nearly 500 million years ago is exciting in and of itself, but what really excites us about this breakthrough is how much we will be able to learn from it.
"We aren't just looking at fossils in the ground, we are trying to better understand life through working with amazing paleontologists," he added.
The findings of the team were published in the Proceedings of the National Academy of Sciences.
Related Article : Noah's Ark Site Discovered? Archaeologists Find Evidence of Human Activity Near 5,000-Year-Old Boat-Shaped Mound in Turkey
ⓒ 2026 TECHTIMES.com All rights reserved. Do not reproduce without permission.


