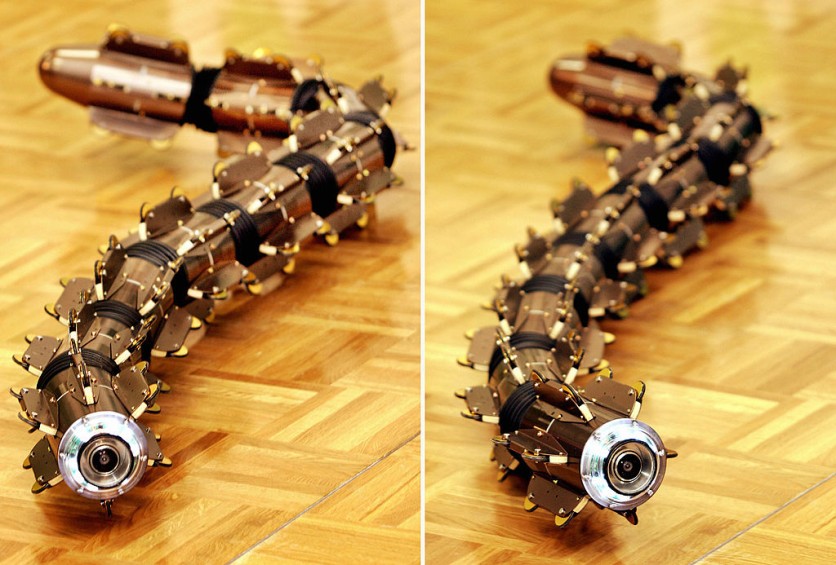
Ben-Gurion University engineers claim to have created one of the fastest and most efficient amphibious robots called "AmphiSAW".
The robot's movement in the water is modeled after the movement of flippers while its movement on land is designed after centipedes.
Search and Rescue Robots
Potential uses for the robot include search and rescue, particularly in the event of natural disasters such as floods and tsunamis.
According to the team, the robot travels fast whether it operates on land or in the water. They demonstrated that the robot can swim at 0.74 body lengths per second (B/s) and crawl at 1.5 B/s on land.
Additionally, they can be equipped with front legs or wheels, which quickens their crawling pace, especially on rough ground.
"The single motor and bioinspired design contribute significantly to the robot's efficiency and the relative simplicity of its design means it is scalable to any size," Dr. David Zarrouk, an engineer at the Ben-Gurion University of the Negev, explained in a press release statement.
His research aims to create robots that can perform difficult movements while consuming little energy to operate.
Read Also: Decade-Old NASA Moon Rover Undergoes Pressurized Ground Tests; Here's What to Know About Desert RATS
Undulatory Motion
Many creatures, from micro-scale bacteria to meter-scale vertebrates, depend on an undulatory motion to move forward on land and in the sea. Amphibious animals like salamanders and sea snakes, in particular, depend on this form of locomotion.
Undulatory motion can be employed for both swimming and crawling but only a few robots can replicate it since it necessitates the coordination of numerous joints.
The team reported a new minimalistic method for both crawling and swimming based on a wave motion in the sagittal (vertical) plane. Hence, AmphiSAW was then developed to showcase this methodology in many contexts.
The robot's performance can be improved by adding legs or wheels to the front, especially when it is crawling over uneven terrain.
Together with its fast speeds, the robot boasts the lowest transport costs of all the amphibious robots described in the study's literature.
The team's findings were reported in an article titled "A novel wave-like crawling robot has excellent swimming capabilities" that appeared in the peer-reviewed journal Bioinspiration & Biomimetics on Feb. 7.
Related Article : Robot Dogs: 'Pack Assistants' Now Equipped With Surveillance Technologyb But What's the Concern?

ⓒ 2025 TECHTIMES.com All rights reserved. Do not reproduce without permission.




