The transition from one terrain to another is not easy for a machine. The change in the environment could affect its functions, so its parts should perfectly fit in different situations.
Shape-Shifting Robot Can Adjust at Different Environments
A robot, for example, will have a hard time operating in places that it is not suitable for it. But, a new robot could make a big difference through its shape-shifting mechanism.
Shape Shifting Robot
As humans, our adjustments are easier than robots. We could walk and then shift to swimming immediately. However, in terms of tasks that are dangerous for a human to do, a robot is sent to do such a job, like in the case of the recent Mars rover exploration.
On the other hand, a machine is limited to its capabilities, but through this robot, adjustments have been made for ease of traversing terrain changes.
According to a report by The Next Web, the idea came from experts from the University of Oslo.
The team has come up with a plan to devise a creation that can modify its body according to its environment. The research is published in Nature Machine Intelligence.
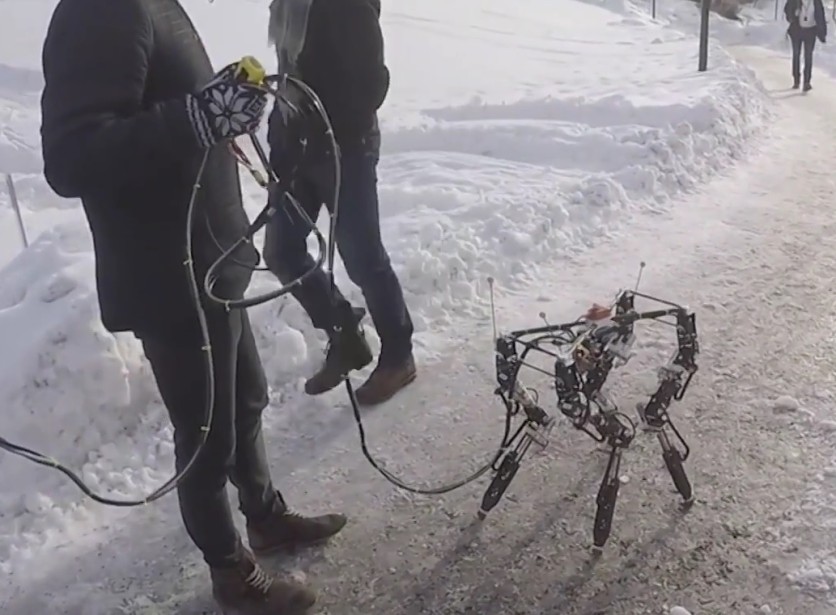
The creator of the DyREt, or the Dynamic Robot for Embodied Testing, was dubbed as "the animal." Tønnes Nygaard was the person behind the idea of its convenient shifting.
The robot has four legs, with each of them having the same length of the shin bones. For the shape-shifting to be possible, motors were attached to the legs so that it could adjust its length when the robot wants to modify its parts.
From its original height of 60 centimeters, DyRet can be as tall as 73 centimeters through the motors. The 13-centimeter-difference can pave a lot for new things that a robot could do. For example, DyRet is slower when it has shorter legs, but when it becomes taller, it could run faster than before. It can also jump through hurdles.
Moreover, the sensors connected to DyRet indicate what it is stepping on. The force sensor, in particular, helps the robot to determine the hardness of the ground. Between its front legs, a 3D camera captures its motion so it could easily estimate the condition of the terrain.
Through the camera and its feet, DyRet could walk without any interruptions. When it identifies that the conditions change, the length of its leg will adjust.
Read Also: Hybrid Robot Can Now Hear Using Dead Locust's Ear, Can Move Upon Interpreting Sounds
Two Tests to Determine How the Shape-Shifting Robot Adjusts to Situations
Have you wondered how the recognition of the environment works for the robot? Two tests have been carried out to answer this question, involving a smooth surface indoor and a real surface outside.
For the tests, DyRet was instructed to walk inside a 5-meter box where the surface varies from sand to cement. After the experiment, the robot was able to determine which terrain it is stepping on, which enables it to select the best option for its modification.
In addition, it was found out that DyRet has been successful in walking a terrain that it traveled previously. The unseen terrain was patterned to the robot's adjustments by estimating what body shape it will choose.
On the other hand, a machine-learning model has been utilized during outdoor experiments. The best configuration for the leg was decided for the given variables of roughness and hardness of a particular terrain.
The robot seemed to memorize the adjustments that it can do during the experiment, so its measurement adjustment will be precise for the terrain.
This concludes that DyRet was improving when it comes to prediction every time it walks. This contributed to its shifting even in the unseen environments.
Related Article : Bionaut Robots Can Now Be Used to Attack Brain Tumors; Tiny Devices Can Surpass Surgical Drilling
This article is owned by Tech Times.
Written by Joen Coronel
ⓒ 2026 TECHTIMES.com All rights reserved. Do not reproduce without permission.




